 |
|
| tecnologia meccanica |
|
AMPLIFICATORI OPERAZIONALI
1) Elenca le caratteristiche di un amplificatore operazionale ideale.
L'A.O. ideale possiede un guadagno di tensione ad anello aperto infinito e una larghezza di banda infinita, presenta inoltre un'impedenza d'ingresso infinita, un'impedenza d'uscita nulla ed uno slew-rate infinito.
2)Elenca le caratteristiche di un amplificatore operazionale reale.
L'A.O. reale si distingue per l'elevatissimo guadagno di tensione ad anello aperto, alta impedenza d'ingresso, bassa impedenza d'uscita e un'ampia larghezza di banda ed uno slew-rate elevato.
3) Che cos'è la reiezione di modo comune?
Reiezione di modo comune s'intende la capacità di un A. di non amplificare i segnali uguali presenti contemporaneamente ai due ingressi, positivo e negativo, si misura in decibel (Db), è importante conoscere questa caratteristica perché segnali di questo tipo sono generalmente provocati da disturbi elettromagnetici, e si devono quindi eliminare.
4)Dare una definizione di Slew-Rate.
Lo S.L. è il rapporto tra la variazione della tensione d'uscita rispetto al lasso di tempo impiegato in risposta ad una tensione d'ingresso a gradino, è misurato normalmente in volt per microsecondo ( V / msec )
5)Quali sono i vantaggi della retroazione negativa in un amplificatore operazionale?
Amplifica la tensione senza deriva termica, la retroazione negativa permette anche, con un'opportuna rete esterna, un adattamento delle impedenze d'ingresso e d'uscita e della larghezza di banda dell'amplificatore, nonché del guadagno.
6)Perché è necessario ridurre il guadagno di un amplificatore operazionale rispetto al suo valore ad anello aperto?
Il guadagno ad anello aperto di un amplificatore operazionale assume un valore molto alto, ne consegue che basta una tensione d'ingresso molto bassa per pilotare l'amplificatore operazionale in saturazione; inoltre guadagni troppo elevati danno luogo a possibili instabilità del sistema controllato.
7)Qual è il principio di funzionamento della retroazione negativa?
La retroazione negativa permette di prelevare una porzione del segnale d'uscita e di riapplicarla, sfasata in ingresso di 180°, producendo così una diminuzione del guadagno ad anello chiuso.
8)Esiste un legame tra guadagno ad anello aperto e guadagno ad anello chiuso?
No, il guadagno ad anello chiuso è generalmente molto inferiore rispetto a quello ad anello aperto ed è sostanzialmente indipendente da esso, purché quest'ultimo sia elevato.
9)Se si dispone un amplificatore operazionale in conurazione ad inseguitore di tensione(buffer) l'impedenza d'ingresso aumenta o diminuisce, rispetto a quella che esso presenta normalmente ad anello aperto?
L'impedenza d'ingresso aumenta enormemente, mentre quella d'uscita risulta praticamente nulla
10) Di che tipo può essere la conurazione circuitale esterna dell'amplificatore operazionale?
L'A.Op. può essere conurato nei seguenti modi:
invertente
non invertente
con retroazione positiva
con retroazione negativa.
11) In un amplificatore non invertente con segnale di ingresso ½ e con retroazione < zero e con b = 1 che valore presentano parametri come: V0, Zf, Zi?
V0 Vi Zf T 0 Zi T
12) Come si può ottenere la riduzione dei disturbi di natura termica o elettromagnetica, chiamati genericamente rumore?
a) Con l'utilizzo di filtri passa-basso di opportuna frequenza di taglio ed adeguata attenuazione, se si utilizzano in funzione amplificatrice;
b) per ridurre tale effetto, quando interessi il funzionamento come ON - OFF, in alternativa può essere utilizzata l'isteresi, basata sulla retroazione positiva: cioè quando la tensione di ingresso sale, il livello della tensione di riferimento risulta più elevato di quando la tensione di ingresso scende ( cioè passa da un valore maggiore ad uno minore ).
13) In che modo si eliminano le commutazioni indesiderate nei atori, dovute ad effetti termo-elettromagnetici detti anche rumore?
Adottando un dispositivo ad A.Op. opportuno : il atore con isteresi, chiamato anche TRIGGER DI SMITH, che presenta due punti di commutazione differenziati.
14) Quale deve essere il valore di Rf / R di un amplificatore invertente con retroazione < 0,che genera in uscita il valore medio di 2 ingressi?
Il valore si ottiene rendendo il rapporto Rf / R uguale al reciproco del numero degli ingressi.( Es.: 4 ingressi Rf / R = ¼ ; 2 ingressi Rf / R ½ T Rf = R / 2 )
15) Qual è la conurazione tipica di un A. Op. che realizza in pratica un TRIGGER DI SMITH?
Il trigger di Smith viene realizzato con uno schema a atore, con segnale all'ingresso applicato al morsetto invertente ,con retroazione positiva , che può presentare o meno una fonte di forza elettromotrice presente nel circuito di retroazione, per poter effettuare commutazioni attorno ad un valore
16) In quale caso abbiamo un circuito integratore puro?
Quando l'impedenza di retroazione sarà costituita da una capacità ,mentre quella di ingresso sarà una semplice resistenza, ed il valore R * C = 1s
17) Dare una definizione di guadagno di tensione ad anello aperto.
È il rapporto che si ottiene tra la variazione di tensione di uscita e la variazione di tensione differenziale di ingresso, normalmente espresso in decibel ( Db ), senza retroazione.
18)Che informazioni ci fornisce un A. Op. in conurazione a atore?
Il atore ad A.Op. si informa se la tensione di ingresso è maggiore o minore di quella di riferimento, assumendo, a seconda del caso, valori pari a ± Vcc.
19) In quale modo un A.Op. ci informa se la tensione di ingresso è maggiore o minore rispetto a quella di riferimento?
Il atore ad A.Op., nei due casi, va in saturazione ,ed assume in uscita una V0 prossima a Vcc ( tensione di alimentazione dell'amplificatore )
20) Indica un vantaggio offerto dai filtri attivi?
21) In che cosa consiste un A.O.derivatore?
E' un A.O. la cui uscita è proporzionale alla derivata della tensione di ingresso ,esso si presta egregiamente nei sistemi di regolazione e controllo per riconoscere la tendenza dell'evoluzione del sistema, per poterne certificare e correggere l'andamento.
22) Cosa produce un integratore ad A.Op.?
L'integratore produce un uscita proporzionale all'area sottesa alla curva individuata dalla tensione di ingresso, riportata in funzione del tempo (ascissa)
23) Conosci alcuni tipi di A.O. utilizzati come convertitori?
a) Convertitore corrente - tensione
b) Convertitore tensione - corrente
c) Convertitore frequenza - tensione
d) Convertitore tensione - frequenza.
24) Spiega il funzionamento del convertitore corrente-tensione.
Esso produce una V0 ( tensione di uscita ) proporzionale alla corrente che entra nel dispositivo.
25) Dove si usa l'A.Op .delle differenze?
Nella verifica / amplificazione di due segnali: uno che rappresenta il SET , l'altro il segnale proveniente dal campo , si ottiene una amplificazione proporzionale alla differenza . Il dispositivo viene usato come nodo di confronto nello schema di A.Op con retroazione . (anello chiuso o con feed-back).
1) Cos'è un trasduttore di temperatura?
Un trasduttore di temperatura è un dispositivo atto a convertire una variazione di temperatura in una variazione di f.e.m. oppure in una variazione di resistenza, cui corrisponde una variazione di corrente o di f.e.m.
2) Elencare i principali tipi di trasduttori di temperatura.
I principali tipi di trasduttori di temperatura sono:
- termocoppie (NiCr, Cu-Costantana, Fe-Costantana, Chromel - Alumel, Pt + (Pt- Rh);
- termoresistenze (Ni 100, Ni 200, Pt 100, Pt 1000);
- termistori (NTC, PTC).
3) Descrivi il fenimeno fisico su cui si basa il funzionamento di una termocoppia .
Le termocoppie convertono le variazioni di temperatura in differenze di potenziale basandosi sull'effetto Seebek per il quale se due materiali diversi vengono messi a contatto elettrico componendo un anello e le relative giunzioni sono portate a due diverse temperature, nella maglia si ha una circolazione di corrente; se il circuito viene interrotto, si origina una f.e.m. proporzionale alla ∆T per le giunzioni.
4) Cos'è un cavo compensato?
Un cavo compensato o cavo di estensione è un cavo che ha le stesse caratteristiche termoelettriche delle termocoppie, ma il costo è inferiore perché realizzati con materiali meno pregiati. La funzione del cavo compensato è quella di collegare il giunto di misura di una termocoppia con il giunto freddo, che possono essere distanti parecchi metri, senza alterare la risposta del sistema.
5) Cos'è una termoresistenza o termoresistore?
I termoresistori sono dispositivi che convertono le variazioni di temperatura in variazioni di resistenza, composti da materiali tradizionali (metalli o leghe).
6) Elenca i requisiti necessari affinché un materiale venga considerato idoneo all'impiego in una termoresistenza.
I requisiti necessari affinché un materiale venga considerato idoneo all'impiego in un termoresistore sono:
elevato coefficiente di variazione di α [ Ω/ °C ];
linearità della risposta [ costanza di α con la temperatura;
assenza di alterazioni (ossidazioni) dovute all' ambiente e alla temperatura di esercizio
7) Quali sono i materiali più utilizzati nelle termoresistenze?
I materiali che generalmente sono più utilizzati nelle termoresistenze sono nichel e relative leghe, platino.
8) Indicare quali sono gli intervalli di temperatura di applicazione pratica delle varie termoresistenze in nichel e platino.
Gli intervalli di temperatura sono:
- nichel -200 ÷ +350 C°;
- platino -200 ÷ +600 C°.
9) Qual'è la differenza tra una termoresistenza e un termistore?
La differenza tra termoresistenze e termistori consiste principalmente nel fatto che le prime sono costituite da materiale metallico e che il coefficiente di temperatura è costante; mentre le seconde sono costituite da semiconduttore e quindi il coefficiente di temperatura, oltre al fatto che può essere sia positivo che negativo, non è lineare né costante con la temperatura.
10) Illustrare la differenza tra i due termistori NTC e PTC.
- PTC (Positive Temperature Coefficient, Coefficiente Positivo di Temperatura). E' un termistore il cui valore di resistenza aumenta con l'aumentare della temperatura e diminuisce quando la temperatura fa altrettanto.
- NTC (Negative Temperature Coefficient, Coefficiente Negativo di Temperatura). E' un termistore il cui valore di resistenza si riduce con l'aumento della temperatura e viceversa.
11) Cos'è un RTD?
L' RTD (Resistence Temperature Detector), è un resistore realizzato in metallo puro (solitamente platino), avente un coefficiente di temperatura definito e costante con la temperatura nel campo di utilizzo e perciò presenta in esso un comportamento lineare.
12) Quali sono i vantaggi e gli svantaggi di un RTD rispetto ad un termistore?
I vantaggi di un RTD rispetto ad un termistore sono:
linearità su un'ampio campo di funzionamento;
funzionamento a temperature più elevate;
elevata intercambiabilità con costanza di prestazioni;
migliore stabilità alle temperature elevate;
mancanza di deriva termica;
non presenta necessità di linearizzazione.
Gli svantaggi, invece, sono:
bassa sensibilità;
costo più elevato;
sensibilità ad urti e vibrazioni;
necessità di 3 o 4 conduttori, per la correzione della resistenza per sonde lontane;
influenza delle resistenze di contatto e dei cavi.
13) Indicare gli intervalli di temperatura di applicazione delle termocoppie di tipo E, J, K.
Gli intervalli di normale applicazione sono:
- E (Chromel - Costantana) -240 ÷ +900 °C;
- J (Ferro - Costantana) 0 ÷ +750 °C;
- K (Chromel - Alumel) 0 ÷ +1250 °C.
- Quali tipi di misurazioni si possono effettuare con gli Strain Gauges?
Si possono effettuare misure indirette di forza, momento flettente e torcente o comunque qualsiasi sollecitazione che induce una deformazione proporzionale ed inoltre nella preparazione manuale ed automatica delle miscele ponderali, per misure indirette della pressione nei recipienti, e per rilievi di altezza dei liquidi nei serbatoi.
- Per quale fenomeno si riesce a rilevare una forza con gli Strain Gauges?
Applicando una forza sul pezzo su cui è collocato per incollaggio lo Strain Gauges si verifica una deformazione che induce un allungamento del filamento che costituisce il trasduttore e provoca quindi una variazione della resistenza secondo la legge di OHM, dovuta alla maggiore lunghezza e alla strizione laterale.
- Scrivere la legge di Hooke e spiegarla
s e E dove:
s = sollecitazione unitaria di tensione
E = modulo di Joung = 210 MN / mq ( per l'acciaio )
e = deformazione = DL / L0 DR / R0
DL = variazione della lunghezza L0 = lunghezza prima della sollecitazione
DR = variazione della resistenza R0 = resistenza prima della sollecitazione
- Spiegare e schematizzare come deve essere posto lo Strain Gauge, nel caso di un pezzo cilindrico sottoposto a sollecitazione di trazione-compressione
Lo Strain Gauge deve essere messo in modo tale che l'asse del filamento coincida con quello della forza alla quale il pezzo è sottoposto.
Schema:
- Spiegare e schematizzare come deve essere posto lo Strain Gauge nel caso di un pezzo cilindrico sottoposto a sollecitazione di torsione
Gli Strain Gauges utilizzati devono essere almeno due, posizionati rispetto all'asse del pezzo a 45° e a 90° tra i loro rispettivi assi e l' asse del pezzo: essi sono così sottoposti alla max deformazione derivante dal fatto di essere collocati nella direzione delle sollecitazioni principali, che risultano essere di compressione l' una, e l' altra di trazione. ( max t
Schema:
- Come si può ottenere una risposta lineare dallo Strain Gauge?
Si deve collegare lo Strain Gauge in un particolare circuito ad amplificatore operazionale, oppure utilizzare un ponte di Wheatstone, però con una idonea collocazione nel ponte in relazione alla disposizione sul pezzo, al tipo di sollecitazione ed al numero di trasduttori utilizzati.
- In quali campi pratici possono essere utilizzati gli Strain Gauges?
Gli Strain Gauges possono essere utilizzati per misurazione di portata (Kg), come ad esempio nelle pese per camion e autoarticolati, ma anche per carichi molto piccoli come nel caso delle bilance di precisione digitali, nei carri miscelatori, nel dosaggio dei componenti delle miscele ponderali, nel confezionamento a peso, nella misurazione di altezze raggiunte dal liquido all'interno dei serbatoi, nei ganci di sollevamento in funzione di sicurezza, negli ascensori per impedire la partenza in sovraccarico.
Come disporresti gli Strain Gauges su un albero rotante sottoposto a flesso-torsione, per ottenere una risposta proporzionale al momento torcente che sia lineare ma indipendente dal momento flettente.
Utilizzando un ponte di Wheatstone, come li disporresti nel ponte?
Produci uno schema dettagliato delle due disposizioni.
Schema:
TRASDUTTORI DI POSIZIONE, DI VELOCITA' E DI ACCELERAZIONE
D: Quante fotocellule ci sono normalmente nell'encoder incrementale e spiega la funzione di ognuna di esse/a.
R: Nell'encoder incrementale ci sono di solito tre fotocellule: una serve per rilevare il numero di giri del disco e per effettuare un eventuale azzeramento iniziale; mentre le altre due (sfasate di ¼ di passo) servono per contare le tacche e per rilevare il senso di rotazione.
D: Nell'encoder assoluto quale tipo di codifica per il segnale di uscita viene utilizzata e per quale motivo?
R: Il codice usato è normalmente il tipo Gray perché tra il numero precedente e il successivo cambia solamente di una cifra; questo evita errori connessi alla variazione contemporanea di più bit ( l' allineamento perfetto è cosa meccanicamente impossibile) e semplifica le operazioni di rilevamento della posizione.
D: Perché non impiegheresti potenziometri rettilinei a resistenza variabile come trasduttori di posizione per robot o macchine utensili?
R: Perché richiedendo per il loro normale funzionamento il contatto fisico tra parte fissa e parte mobile sarebbero soggetti a forte usura che grava sulla precisione e sulla affidabilità nel tempo.
D: Di quanto devono essere sfasati i due circuiti (mobile e fisso) nel risolutore lineare o inductosyn e perché?
R: I due circuiti devono essere sfasati di ¼ di passo in modo che le tensioni risultino sfasate di 90 gradi così da consentire la determinazione della posizione nell'intero passo, decodificata attraverso opportuno circuito elettronico.
D: La differenza in tensione del secondario di un LVDT in che caso è uguale a zero?
R: È uguale a zero quando il nucleo ferromagnetico si trova in posizione simmetrica rispetto ai due avvolgimenti.
6) D: Enuncia il principio di funzionamento del sensore ad effetto Hall.
R: Si basa principalmente sullo spostamento di cariche nel conduttore trasversale dovuto alla forza detta di Lorentz che si esercita su cariche in movimento in un campo magnetico la cui intensità è data dalla formula: F=q*V L B con:
q: carica che attraversa la lamina in materiale ferromagnetico
V: velocità della carica
B: l' induzione magnetica del campo ortogonale alla corrente
7) D: Descrivi la funzione del trasduttore syncro.
R: Il trasduttore syncro è adatto per il rilevamento della posizione tra il rotore e lo statore, oppure a rilevare la posizione differenziale tra i due nonché come trasduttore di coppia tra di essi, proporzionale alla differenza fra le due posizioni angolari.
8) D: Descrivi il principio di funzionamento del syncro.
R: E' un trasduttore ad uscita analogica e funziona come il trasformatore con un accoppiamento variabile del flusso tra il primario e secondario.
D :Da che cosa dipende il grado di risoluzione di un encoder?
Dipende sostanzialmente dal numerosi tacche che presenta il disco dalla relazione:
N=D*p/2d
dove: D = Diametro disco
d = Spessore di una tacca
Normalmente, attraverso circuiti combinatori opportuni, si riesce ad ottenere una risoluzione tra le 2 e le 4 volte la precedente.
10) D: Scrivi la formula della legge che nella dinamo tachimetrica rende la tensione in uscita proporzionale alla velocità di rotazione dell'albero.
R: E = K*N*
Dove K = Costante tachimetrica
N = Numero di giri dell'albero
= Flusso magnetico del campo di eccitazione, costante.
Domande sui trasduttori di posizione, accelerazione e velocità (a RISPOSTA MULTIPLA)
1)Quali sono tra questi i trasduttori di posizione angolare?
q Potenziometro rotativo
q Trasduttore syncro
q Trasduttore capacitivo
q Trasduttore RTD
q Encoder ottico Assoluto
2) Nel trasduttore inductosyn lineare le due serie di greche conduttrici di conteggio serigrafate devono essere sfasate di:
q 2/8 di passo dalla tacca di riferimento angolare (conteggio sul giro)
q ¼ di passo se i due sistemi a diodi sono allineati
q Non è necessario che siano sfasate perché si possono sfasare i diodi tra di loro proprio della stessa quantità richiesta
q 1/6 di passo rispetto al diodo emettitore
q ¼ di passo
3) Il trasduttore syncro è strutturalmente composto da:
q Un rotore a due avvolgimenti
q Un rotore a un avvolgimento con uno statore che presenta quattro avvolgimenti da 90 gradi
q Un rotore ad un solo avvolgimento
q Statore che presenta tre avvolgimenti sfasati di 120 gradi
q Una riga ottica con piastrina di esplorazione con tacche opache fotoincise sfasate di ¼ di passo
4) Quali di queste affermazioni sono vere?
q L'encoder incrementale può arrivare normalmente ad un regime di rotazione di 5000 giri/minuto
q I cuscinetti di supporto devono essere del tipo a rullini cilindrici per supportare gli elevati squilibri dell'albero causati dalla elevata rotazione del disco rotante
q Nell'encoder assoluto il numero di fotocellule è uguale al numero di piste
q La risoluzione varia dai 10 ai 1024 Hz/mm
q Il codice utilizzato dall'encoder incrementale è normalmente di tipo Gray
5) Quali tra le seguenti affermazioni sono esatte?
q Il sensore a effetto Hall è di tipo capacitivo
q L'effetto Hall è una conseguenza sostanziale della forza di Lorentz
q Si può ottenere l'effetto Hall variando opportunamente il campo magnetico su un conduttore modificando nel tempo la riluttanza del circuito magnetico
q La forza di Lorentz tiene conto sia degli effetti del campo elettrico, sia di quelli legati al campo magnetico su una carica in movimento
q Il segno della carica q che attraversa la lamina in materiale ferro-magnetico è uno dei fattori che influenzano direttamente il verso della forza di Lorentz
6) Il finecorsa di prossimità Reed Relais non è composto da:
q Bulbo di vetro con gas inerte
q Lamine di materiale semiconduttore
q Lamine di materiale ferromagnetico
q Magnete permanente
q Un avvolgimento monofase con dispositivo passo-passo (Reelais ad impulsi)
7) I sensori di prossimità Namur non presentano in genere al loro interno:
q Un circuito oscillante
q Un amplificatore di soglia
q Un amplificatore operazionale
q Un avvolgimento induttivo
q Un generatore di tensione continua
8) La dinamo tachimetrica è un trasduttore di corrente:
q Alternata
q Continua
q Sinusoidale in funzione degli avvolgimenti dello statore
q La questione posta dalla domanda è fuorviante ed errata
9) I trasduttori resistivi possono essere di tipo:
q Lineari
q Rotativi
q Di velocità
q Di accelerazione
q Di tutti i quattro tipi sopra elencati
I FILTRI
Sono circuiti selettori che presentano impedenza differenziata rispetto alle componenti armoniche di cui è costituito il segnale di ingresso pensato ripetuto nel tempo ( periodico). Il segnale si può pensare come costituito da una somma di segnali opportunamente sfasati, di ampiezza e di frequenza variabile, dati dallo sviluppo in serie di Fourier, verso i quali il filtro presenta impedenza diversa.
Quali sono le due grandi classi in cui si possono suddividere i filtri e qual è la loro componentistica di base?
I filtri passivi sono essenzialmente realizzati con resistenze, condensatori, e induttanze, mentre quelli attivi sono forniti anche di amplificatori operazionali e transistori.
I filtri passivi, oltre a eliminare le componenti del segnale indesiderato, assorbono parte del segnale;
i filtri attivi forniscono potenza all'uscita ricavandola dalla rete attraverso una opportuna amplificazione del segnale, ristabilendone l' ampiezza, oppure anche amplificandola.
Filtri passa basso,
filtri passa alto,
filtri passa banda,
filtri elimina banda.
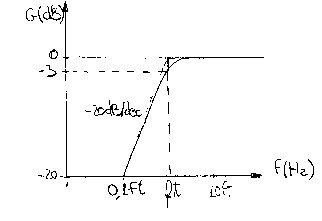
Viene definito guadagno in decibel il logaritmo in base 10 del rapporto tra tensione di uscita e tensione di ingresso moltiplicato per 20: G (dB) = 20 * Log ( Vo/Vi )
La frequenza di taglio è la frequenza del segnale di ingresso alla quale il sistema risponde con un guadagno pari a -3 dB; la larghezza di banda è la gamma di frequenza comprese tra due frequenza di taglio superiore ed inferiore.
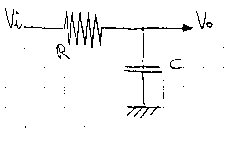 Il filtro passivo
passa basso lascia passare solamente le frequenze più basse di quelle di
progetto: la componente alternata ad alta frequenza vede il condensatore come
un corto circuito e viene perciò scaricata a massa, mentre la componente a
bassa frequenza prosegue verso i morsetti di uscita.
Il filtro passivo
passa basso lascia passare solamente le frequenze più basse di quelle di
progetto: la componente alternata ad alta frequenza vede il condensatore come
un corto circuito e viene perciò scaricata a massa, mentre la componente a
bassa frequenza prosegue verso i morsetti di uscita.

In corrispondenza di ft (freq. di taglio), si ha un guadagno di -3 dB; per frequenze inferiori il guadagno in dB è nullo (in dB 0 ↔ Vo/Vi 1); per frequenze superiori il gudagno sarà di -20 dB/ decade in aumento (ad una f=10 ftT-20 dB) nei filtri di primo ordine, -40 dB/decade per un filtro del secondo ordine.
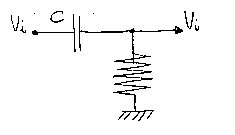 Il filtro passivo
passa alto (costituito da un condensatore e da una resistenza) lascia passare
solo le frequenze superiori a quelle di taglio (frequenza di progetto): le
componenti continue vengono bloccate dal condensatore, che viene visto dalla
c.c. come impedenza grandissima, mentre i segnali ad alta frequenza si
presentano all'uscita del filtro, perché esso lo vedono come un c.c., mano a
mano che la frequenza del segnale aumenta.
Il filtro passivo
passa alto (costituito da un condensatore e da una resistenza) lascia passare
solo le frequenze superiori a quelle di taglio (frequenza di progetto): le
componenti continue vengono bloccate dal condensatore, che viene visto dalla
c.c. come impedenza grandissima, mentre i segnali ad alta frequenza si
presentano all'uscita del filtro, perché esso lo vedono come un c.c., mano a
mano che la frequenza del segnale aumenta.
In corrispondenza di ft si ha un guadagno di -3 dB; per frequenze superiori il guadagno in dB è nullo; per frequenze minori di ft il guadagno sarà di -20 dB per ogni passaggio di decade in diminuzione (0,1 ft= -20 dB).
La frequenza di taglio ft è:
ft=1/(2 * π*R*C)
Disegna lo schema di un filtro passivo passa banda e spiega brevemente il suo funzionamento.
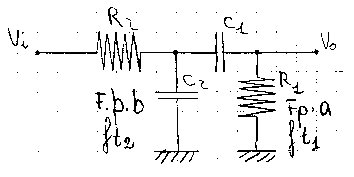
Il filtro passivo passa banda, è costituito da un filtro passa alto e da un filtro passa basso posti in serie, lascia passare solamente le frequenze comprese tra i valori delle due frequenze di taglio che devono essere nel rapporto :
ft2>ft1.
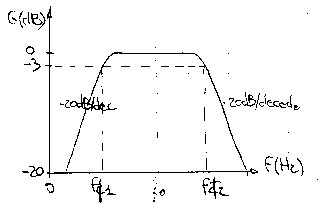 In corrispondenza
delle ft1 e ft2 il guadagno è di -3 dB; per le frequenze maggiori di ft2 e
minori di ft1 il guadagno è di -20dB per ogni passaggio di decade.
In corrispondenza
delle ft1 e ft2 il guadagno è di -3 dB; per le frequenze maggiori di ft2 e
minori di ft1 il guadagno è di -20dB per ogni passaggio di decade.
La banda passante è: ft1 B.P. ft2;
_______
il centro banda: f0 = ft1*ft2
Il filtro passivo
elimina banda, costituito da un filtro passa alto e uno passa basso posto in
serie, lascia passare solamente le frequenze maggiori alla frequenza di taglio
del passa alto e minori alla frequenza di taglio del passa basso.
Le frequenza devono rispettare la relazione: ft2<ft1.
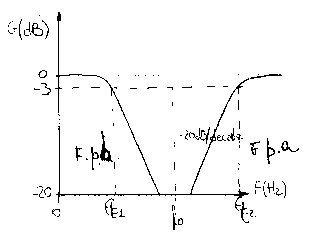 In corrispondenza di
ft1 e ft2 il guadagno è di -3dB; per le frequenze
comprese tra le due frequenze di taglio il guadagno è di -20 dB per ogni
passaggio di decade in aumento o diminuzione; per le frequenze maggiori di ft2
e minori di ft1 il guadagno in dBè nullo; e quindi non abbiamo
praticamente attenuazione.
In corrispondenza di
ft1 e ft2 il guadagno è di -3dB; per le frequenze
comprese tra le due frequenze di taglio il guadagno è di -20 dB per ogni
passaggio di decade in aumento o diminuzione; per le frequenze maggiori di ft2
e minori di ft1 il guadagno in dBè nullo; e quindi non abbiamo
praticamente attenuazione.
Il valore di centro banda è:
______
f0 = ft1*ft2
Qual è il valore della tensione all'uscita? E la frequenza di taglio?
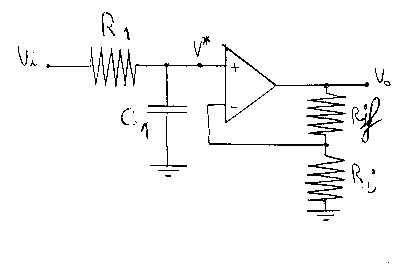 tensione d'uscita:
tensione d'uscita:
V* x (1+Rf/Ri) = V0
frequenza di taglio:
Ft = 1/(2πRC)
L'ordine di un filtro è il numero di coppie RC di cui è costituito. Un filtro di primo ordine ha una curva di risposta con pendenza di -20 dB/decade. Per ogni incremento di ordine del filtro la pendenza aumenta di -20 dB/decade (filtro del secondo ordine = -40 dB/decade, filtro del terzo ordine -60 dB/decade).
L' ordine di un filtro è anche l' ordine dell' equazione differenziale che ne descrive il funzionamento.
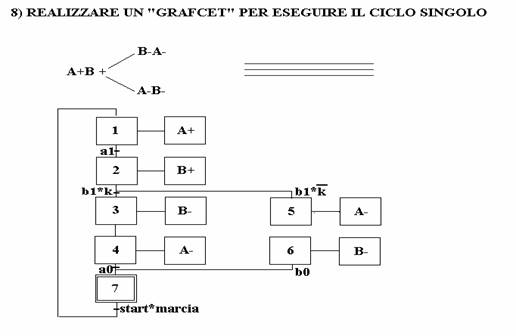
1) Significato della parola GRAFCET
Graphe Fonctionnel de Commande Etapes - Transitions
( Grafico funzionale passi - transizioni)
2) Nel campo dell' automazione a stati finiti, cosa intendiamo con il termine GRAFCET?
Il GRAFCET è un modo di rappresentazione unificatata di una successione di fasi e di condizioni di passaggio fra una fase e l' altra che descrivono un ciclo automatico sequenziale.
Alla fase, detta STEP, viene associata una o più azioni, mentre le transizioni costituiscono le condizioni di passaggio fra uno STEP e l'altro.
3) Che cos'è il SEQUENZIATORE pneumatico?
Si può definire come un dispositivo pneumatico che anziché utilizzare una memoria per ogni gruppo di fasi, usa una memoria per ogni fase del ciclo.
4) Che cos'è e perché viene utilizzato il blocchetto di sicurezza addizionale?
Il blocchetto di sicurezza addizionale è un elemento a cui si ricorre nella pneumatica e in particolare nella tecnologia del sequenziatore per evitare anomalie durante lo svolgimento del ciclo: infatti esso blocca il passaggio alla fase seguente se il fine corsa della stessa fase da eseguirsi è già attivo al momento del passaggio della fase precedente rispetto alla fase da esguirsi.
5) Cosa si intende per STEP in un ciclo automatico e come va rappresentata nel GRAFCET?
Esso va rappresentato con un riquadro con al centro il N° di STEP.
Per lo STEP iniziale si usa un doppio riquadro, con il numero al centro.
6) Cosa sono gli arresti in un circuito pneumatico e quali tipi ci sono?
Gli arresti sono dei bloccaggi procurati dall' operatore, del ciclo in evoluzione.
Due possono essere le modalità :
a) ARRESTO NORMALE O A FINE CICLO
b) ARRESTO D' EMERGENZA
PLC
1) Che tipo di logica permette il PLC?
Il PLC permette la cosiddetta logica programmata.
2) Che cos' è la logica cablata?
La logica cablata è la logica che fa uso di interruttori NC NO collegati tra loro con una rete elettrica, "cavi di collegamento" e relè.
3) Quali sono gli svantaggi ed i vantaggi della logica cablata?
Gli svantaggi sono i seguenti:
se cambia la sequenza del ciclo bisogna cambiare tutta o parte della rete elettrica di comando
Possibile cambio dell' armadio elettrico per quadro di comando per mancanza di spazio per l'ulteriore aggiunta di interruttori ON-OFF o altri componenti.
Il vantaggio di questa logica è che è alla portata del comune elettricista.
4) Dare la definizione di logica programmata?
La logica programmata è quella logica che permette di svolgere le azioni di un ciclo di
automazione attraverso operazioni del tipo AND, OR, NOR, EXOR ecc. utilizzando le regole
tipiche dell'algebra di Boole, scrivendo un opportuno programma.
5) Quali sono i vantaggi della logica programmata?
I vantaggi sono:
1) semplicità della rete (circuito)
2) qualsiasi modifica del ciclo si risolve in genere variando solo il programma
3) una singola macchina ( PLC ) può comandare contemporaneamente più stazioni di lavoro o macchine
4) questa logica è indispensabile quanto il circuito di comando è estremamente complesso
5) c'è possibilità di simulare il processo fuori opera per verificare il corretto funzionamento del programma.
Quali sono gli svantaggi della logica programmata?
Gli svantaggi sono:
1) costo eccessivo del PLC per circuiti di piccola complessità (in questo caso meglio
utilizzare i sequenziatori)
2) questa logica ha bisogno di tecnici validi per la programmazione corretta del PLC.
Quali tecniche conosci per la programmazione del PLC?
La tecnica Ladder (scala a pioli) che si avvale dell'algebra di Boole, tipica dei programmi a logica combinatoria, e la tecnica Graftec per programmi sequenziali.
Cosa significa COB?
Cyclic organization block: blocco ad organizzazione ciclica: è un programma che il PLC spazzola continuamente, eseguendo le operazioni in base alle condizioni logiche programmate, migliaia di volte al minuto.
Quanti COB può gestire il PCD 1, e quanti PB ?
Il PCD1 può gestire fino a 16 COB.
Il PCD1 può gestire fino a 300 program blocks.
10) Quale programma viene chiamato una sola volta all'accensione del PLC?
Il programma che viene chiamato una sola volta all'accensione del PLC è XOB 16.
11) Come viene organizzato il Graftec?
Il Graftec viene organizzato come sequenza di step e transizioni, comprendendo anche possibilità di programmi paralleli, programmi alternativi, salti di fase o ritorni di fase, scelte fra alternative . .
12) Che cos'è uno step?
Lo step è uno degli stati del sistema cioè il complesso delle memorie , dei finecorsa, dello stato delle entrate e delle uscite che caratterizzano quello stato del sistema.
13) Che cosa rappresenta una transizione?
Una transizione rappresenta la/le condizioni logiche per passare da uno step all'altro.
14) Descrivi cosa fa il PLC quando trova una transizione verificata?
Se la transizione è verificata passa dallo stato precedente ( step) a quello successivo ed esegue immediatamente tutti i comandi abbinati a quello step, passa poi a verificare se la transizione successiva è verificata: se risulta verificata passa avanti allo step successivo, altrimenti torna al COB principale, per poi ritornare a verificarla il giro successivo.
15) Di che tipologia di programma è tipica l'istruzione OUT?
L'istruzione OUT è tipica del programma ciclico.
16) Di quale tipo di programma sono tipiche 1e istruzioni SET e RES?
L'istruzione SET e RES sono tipiche dei programmi sequenziali.
17) Traduci in parole il significato dell' istruzione " DYN F101" .
Per una sola volta esegui l'operazione successiva, se operazione è eseguita proprio in quel
giro del programma alza il flag F 101, è una bandiera o collocamento di memoria unitario per
la memorizzazione del evento.
18) Quali sono le istruzioni tipiche in cui si usa il DYN ?
Il DYN si usa nella temporizzazione e nei contatori o nel richiamo di programmi da
eseguire una sola volta (es.: emergenza).
19) Quali sono le operazioni che non dipendono dallo stato dell' ACCU ?
Le operazioni che non dipendono dallo stato dell' ACCU sono quelle tra registri.
20) Che cos' è un XOB.?
XOB significa: exception organization block: blocco ad organizzazione eccezionale: esso viene portato in esecuzione solamente quando si verifica un determinato tipo ( codice ) d'errore.
Essi consentono la gestione delle emergenze e delle azioni straordinarie da mettere in atto al verificarsi di particolari eventi. Esso termina con l' istruzione EXOB.
21) Che cos' è un P.B.?
Significa blocco programma. E' una serie di istruzioni da eseguire in modo condizionato o no, in maniera ciclica.
Il P.B. è generalmente richiamato da un COB.
Esso termina quando incontra l' istruzione EPB.
22) Che cos' è un S.B.?
E' un programma di tipo sequenziale, che viene generalmente chiamato da un COB o da un PB, in modo condizionato o no.
E' composto da step e transizioni, e si costruisce a partire dal GRAFCET.
Esso termina con l' istruzione ESB.
23) Che cos' è un F.B.?
E' l' equivalente di un PB, in cui i parametri vengono passati al FB di volta in volta all' atto della sua chiamata.
Si usa per azioni identiche ripetute in situazioni diverse, per evitare l' intera riscrittura del programma. Esso termina con l' istruzione EFB.
Si definisce sistema regolato l'insieme di tutte le apparecchiature il cui funzionamento è condizionato dai comandi inviati dal sistema di regolazione.
Si definisce grandezza regolata, la grandezza fisica caratteristica per il processo sulla quale vengono eseguite delle operazione di misura e di regolazione dalla quale dipende il buon funzionamento del processo
È il valore prefissato o punto stabilito: è il valore a cui si tende con la regolazione del sistema, cioè quello che si fissa sulla manopola o sul cursore di un potenziometro.
È lo scostamento, la differenza persistente che si mantiene durante il regime normale, tra il valore prefissato e quello regolato.
I regolatori hanno lo scopo di mantenere l'errore di regolazione ( di solito nullo ), entro i limiti assegnati, nonostante la presenza di disturbi. (nell' ipotesi che il riferimento, set-point, sia mantenuto costante )
Ha lo scopo di assicurare l'uguaglianza tra riferimento ed uscita qualunque sia la variazione del riferimento ( il riferimento, set-point, varia continuamente in funzione del tempo )
Per regolazione ad anello aperto si intende un semplice comando, al quale non viene fatta seguire un'azione di verifica del risultato ottenuto, mentre in un sistema ad anello chiuso viene utilizzato un trasduttore per misurare la grandezza regolata e fornire al regolatore elettronico un segnale elettrico proporzionale al suo valore che si dice di retroazione.
La regolazione on-off, o tutto o niente, è caratterizzata dal fatto che l' organo regolante non ha posizioni intermedie, ma solo due possibilità: o tutto inserito, on, o tutto disinserito, off.
Il differenziale è la variazione della variabile regolata in grado di provocare nel regolatore (del tipo tutto o niente), lo scatto dei contatti elettrici dello stesso. Corrisponde quindi ad una zona di insensibilità che sta generalmente a cavallo del valore di set-point prefissato.
Si ha regolazione proporzionale quando la variabile regolante è proporzionale alla variabile regolata secondo l'equazione: y = -Kp * x
Dove y è la variabile regolatrice, x la variabile regolante e Kp la costante della regolazione proporzionale.
La banda proporzionale è un valore caratteristico e tarabile di tutti i regolatori proporzionali. Essa viene definita come la differenza tra il valore massimo e il valore minimo della variabile regolata (x max-x min) che provocano la completa chiusura e la massima apertura dell'organo regolante.
In generale più la banda proporzionale è stretta più il sistema di regolazione risponde velocemente.
Si ha azione diretta in un regolatore quando ad un aumento della variabile regolata corrisponde un incremento dell' azione regolante. Si ha azione inversa quando ad un aumento della variabile regolata corrisponde una diminuzione dell'azione regolante.
La regolazione integrale si ha quando la velocità di variazione della variabile regolata y è proporzionale allo scostamento della variabile regolata x.
Si dice che nelle condizioni di polarizzazione, il sistema funziona ad errore nullo, presenta cioè un'uscita diversa da 0 con entrata (errore) uguale a 0.
Si ha regolazione derivativa quando la variazione y della variabile regolata è proporzionale alla velocità di variazione dell'errore e: yd = ± Kd * (Δe/Δt) , dove:
Kd è la costante derivativa, e il segno + o - sta ad indicare la regolazione diretta o inversa.
Che cosa si intende per variabile regolata:
Si definisce grandezza regolata, la grandezza fisica caratteristica per il processo sulla quale vengono eseguite delle operazione di misura e di regolazione dalla quale dipende il buon funzionamento del processo.
Perché si usano i sistemi polarizzati ?
L' errore a regime è maggiormente ridotto rispetto ai sistemi non polarizzati.
In che cosa consiste la regolazione PI ?
E' la regolazione che abbina alla regolazione proporzionale anche l' azione integrale, con lo scopo di eliminare l' errore a regime.
Che cos' è la regolazione PID ?
Si tratta di un regolatore std. Completo, in cui all' azione proporzionale si abbina l' azione integrale per correggere l' errore a regime, e l' azione derivativa per anticipare la tendenza del sistema stesso, rendendo la correzione più tempestiva.
|
Privacy
|
© ePerTutti.com : tutti i diritti riservati
:::::
Condizioni Generali - Invia - Contatta
